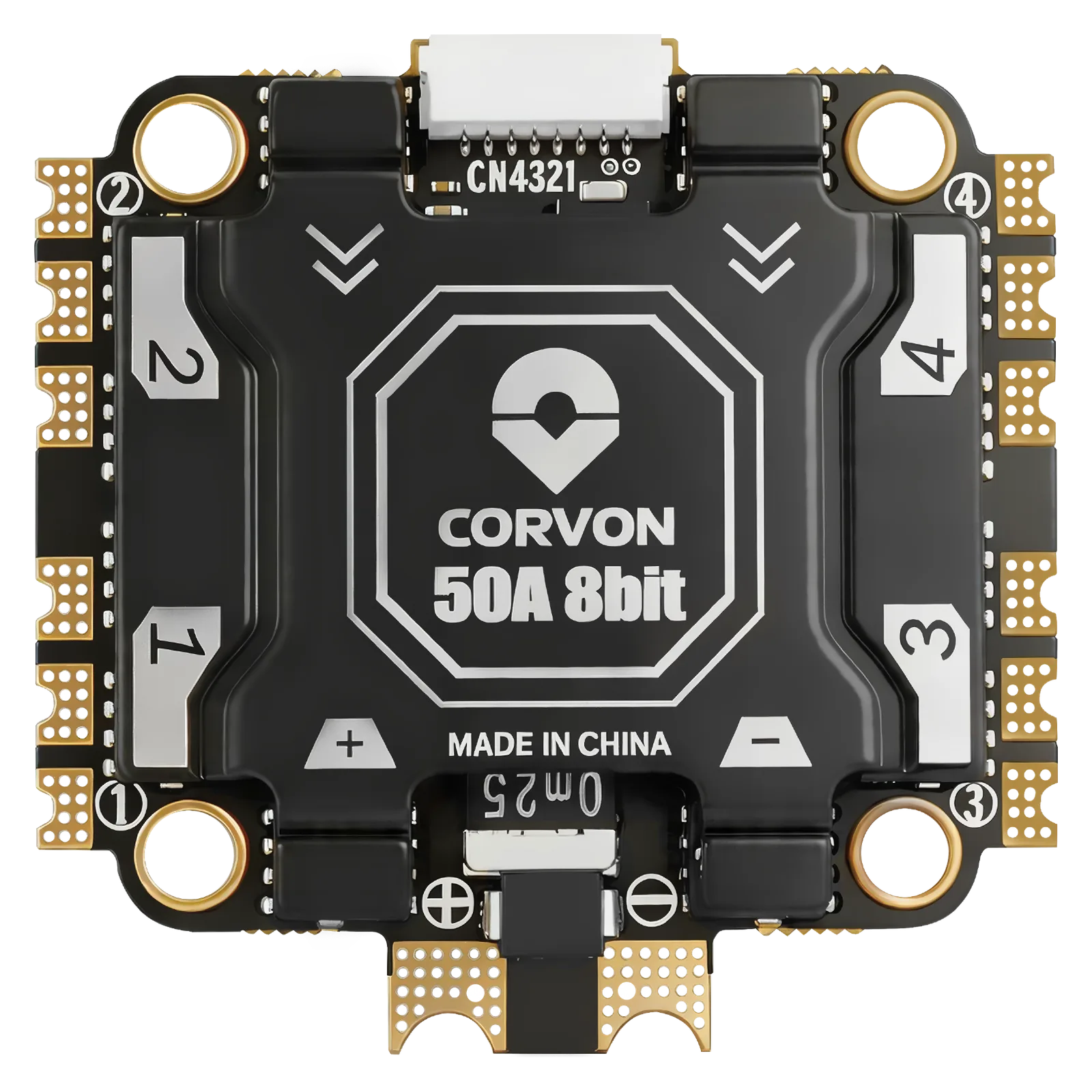
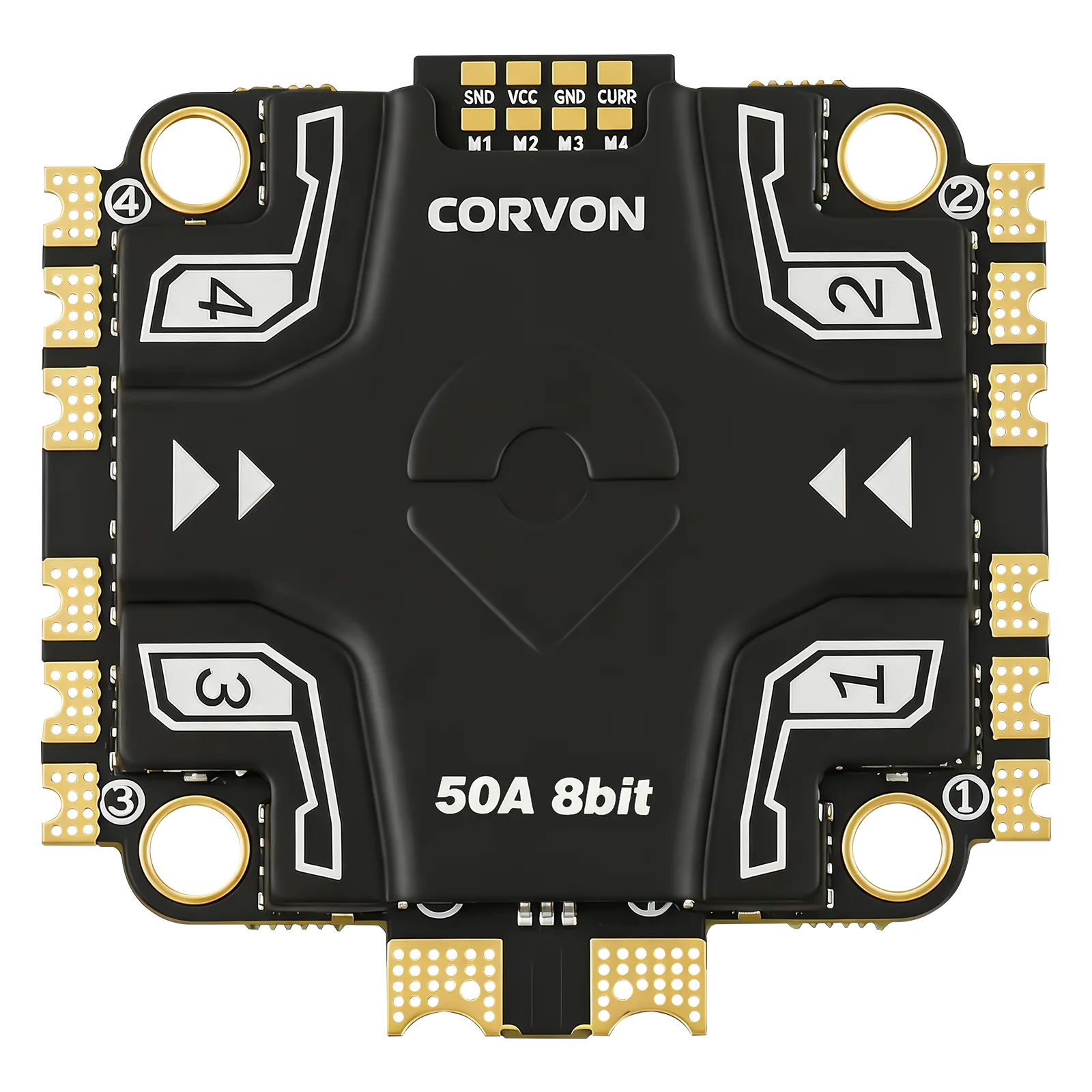
The CORVON 50A is a 4-in-1 brushless ESC built on an 8-bit high-speed MCU, rated for 50A continuous current across all four channels with a 60A instantaneous burst for up to 30 seconds. It supports high-frequency PWM and hardware synchronous rectification with regenerative braking for higher battery energy-recovery efficiency. Excellent throttle linearity delivers responsive deceleration and significantly enhanced aircraft agility. Wide 6V–28V input (2S–6S Li-ion), PWM / DSHOT / ONESHOT drive signals and stall protection round out a compact 4-in-1 integrated design for small aerial-photography and FPV racing drones.
| Model | 4in1-ESC-LD2 · 50A |
|---|---|
| Type | 4-in-1 Brushless ESC |
| MCU | 8-bit High-Speed |
| Input Voltage | 6V–28V · 2S–6S Li-ion |
| Continuous Current | 50A × 4 channels |
| Instantaneous Current | 60A × 4 · max 30 s |
| Drive Signal | PWM · DSHOT · ONESHOT |
| BEC Output | None |
| Stall Protection | Supported |
| Cooling | Natural Convection |
| Connector | SH1.0-8P |
| PCBA Dimensions | 43.5 × 44 × 8.5 mm |
| Mounting Pattern | 20×20 M3 · 30.5×30.5 M4 |
| Weight | Approx. 19 g |
| Operating Temp. | −10°C – +55°C |
| HW / SW Version | v1 / v1 |
| Pin | Name | Function |
|---|---|---|
| 1 | Curr | Current sensor signal |
| 2 | NC | Not connected |
| 3 | M4 | Motor 4 signal |
| 4 | M3 | Motor 3 signal |
| 5 | M2 | Motor 2 signal |
| 6 | M1 | Motor 1 signal |
| 7 | VBAT | Battery voltage sense |
| 8 | GND | Ground |
Connector: SH1.0-8P. Pin order across the connector: Curr · NC · M4 · M3 · M2 · M1 · VBAT · GND.
Thank you for choosing a CORVON product. Please read this disclaimer carefully — by using this product, you acknowledge and agree to the following: brushless power systems can be dangerous, and improper use may result in personal injury or equipment damage. Follow the installation and operation instructions carefully. Because we cannot control how this product is used, installed, or maintained, we accept no liability for any loss or damage arising from its use. Any unauthorized modifications are at your own risk.
Read this manual to understand all power configuration and flight parameters before powering the system. Installation requires soldering and wiring. Make sure all wires are properly insulated before connection to avoid short circuits. Use a soldering iron with adequate power to ensure solid joints — poor connections can cause loss of control or damage to your equipment.