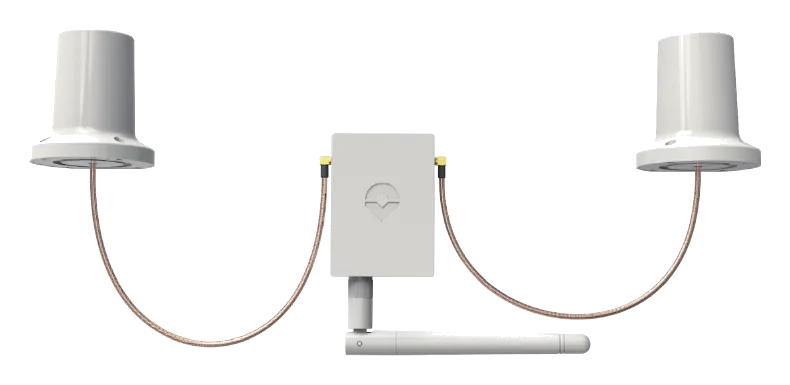
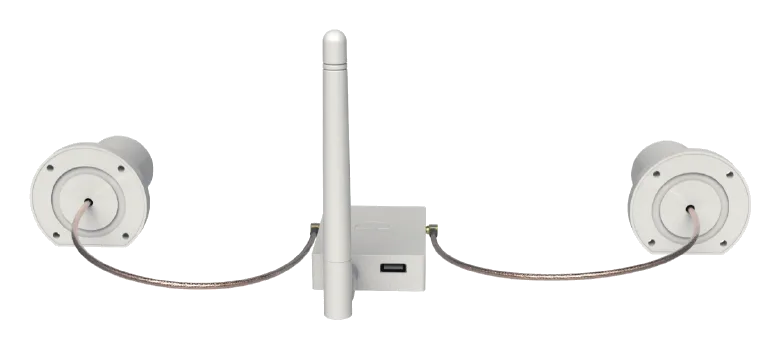
The CORVON RTK-12 Kit-s is a quad-constellation, multi-frequency RTK positioning system that pairs a Ground Base Station (RTK-12-B) with a dual-antenna Sky Rover (RTK-12-Rd) for centimetre-level 3D positioning and heading. The base delivers ultra-high −165 dBm sensitivity and on-chip multi-frequency RTK of up to 0.8 cm + 1 ppm over a LoRa link, while the dual-antenna rover adds a full-constellation moving-baseline heading solution. NMEA-0183 / UBX output and standard RTCM 3.X corrections make it a drop-in reference for drones, vehicles, vessels and survey work.
- Plug-and-Play — pre-configured base & rover
- Ultra-High Sensitivity — −165 dBm
- Dual-Antenna Heading — moving-baseline rover
- Fast Update Rate — up to 20 Hz
- LoRa Link — base-to-rover corrections
- High-Gain Active Antenna — stable, long-range reception
- Standard Protocols — NMEA-0183 · UBX · RTCM 3.X
- Multi-Frequency On-Chip RTK — full-system, up to 0.8 cm + 1 ppm


| Model | RTK-12-B |
|---|---|
| Type | Quad-Constellation Multi-Frequency RTK Base Station |
| Constellation | BDS · GPS · GLONASS · Galileo (multi-frequency) |
| Sensitivity | −165 dBm |
| Single-Point Accuracy | 1.5 m horizontal · 2.5 m vertical |
| RTK Accuracy | 0.8 cm + 1 ppm horizontal · 1.5 cm + 1 ppm vertical |
| PPS Accuracy | 20 ns (RMS) |
| Velocity Accuracy | 0.03 m/s (RMS) |
| Time To First Fix | cold < 30 s · hot < 4 s |
| Initialization Reliability | > 99.9% |
| Data Update Rate | 1 Hz (up to 20 Hz) |
| Baud Rate | 115200 |
| Differential Data | RTCM 3.X |
| Data Format | NMEA-0183 · Unicore |
| Data Link | LoRa · 902–928 / 863–870 MHz · TX 22 dBm · RX −115 dBm |
| Operating Voltage | 5 V (adapter ≥ 2 A) |
| Operating Current | Startup ≤ 2.2 A · steady-state ≤ 450 mA |
| Operating Temp. | −40°C ~ +85°C |
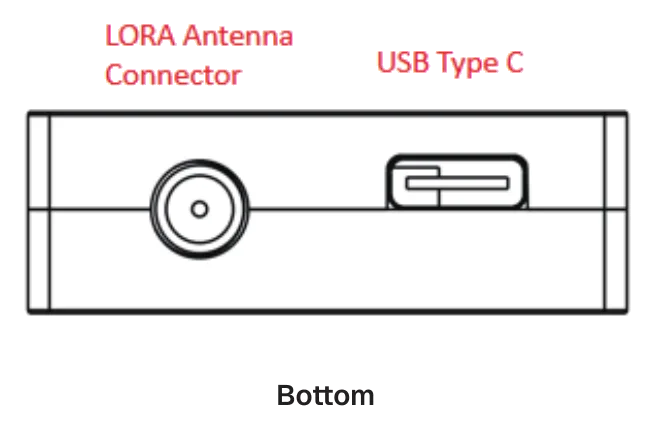
| Interface | USB Type-C (power) |
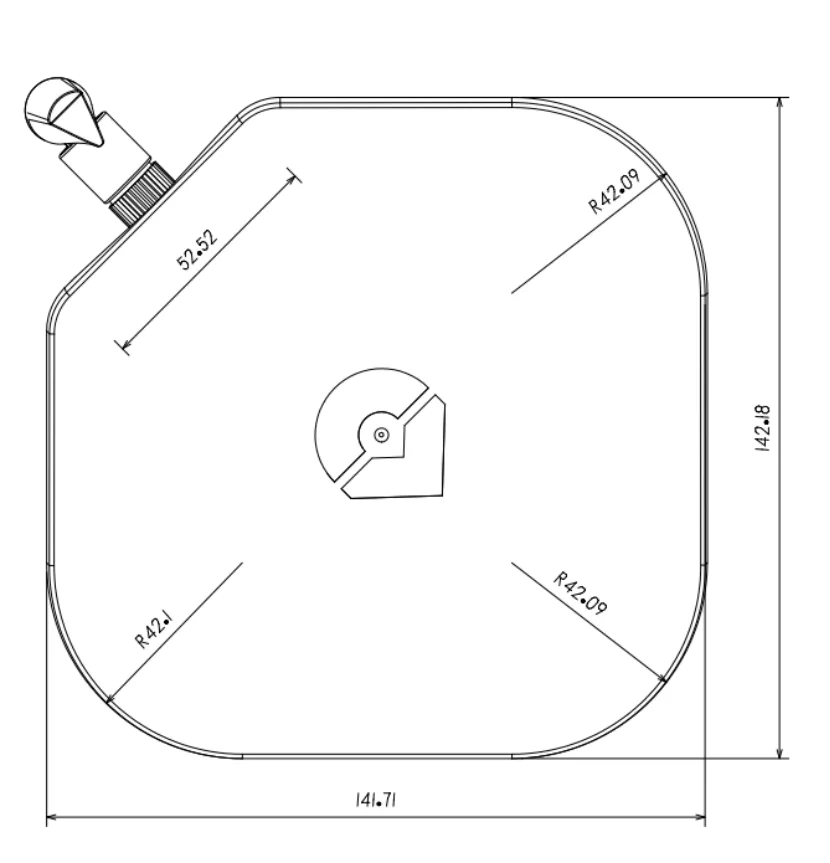
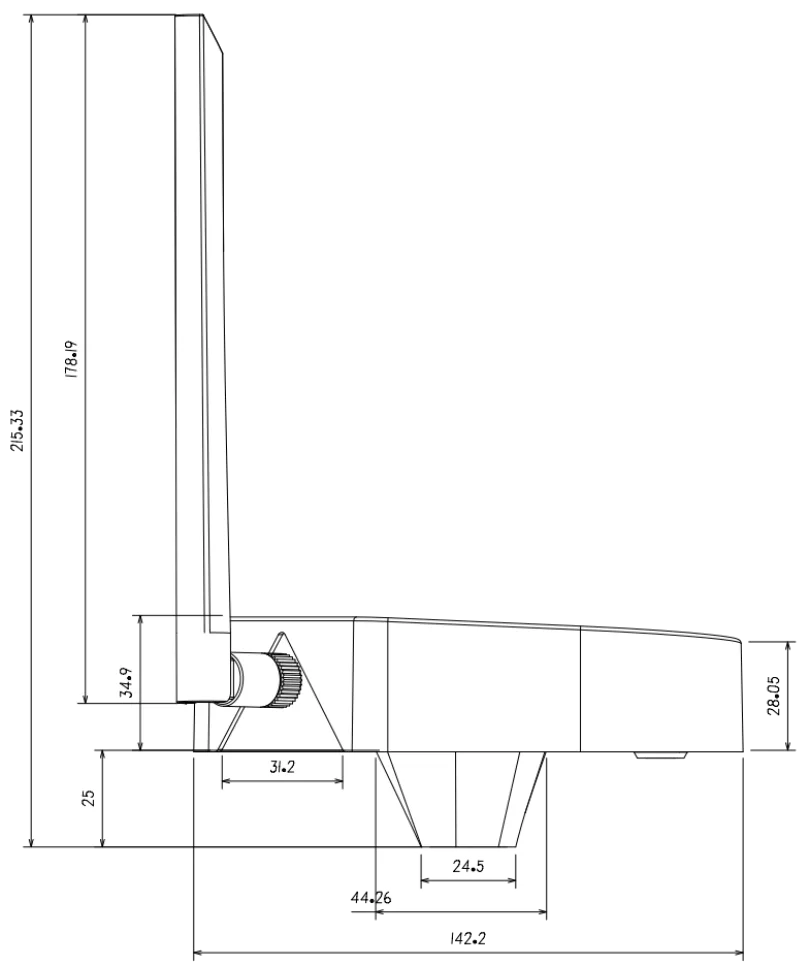
| Dimensions | 142.18 × 141.71 × 215.33 mm (±0.3 mm) |
| Weight | ≈ 308.8 g |
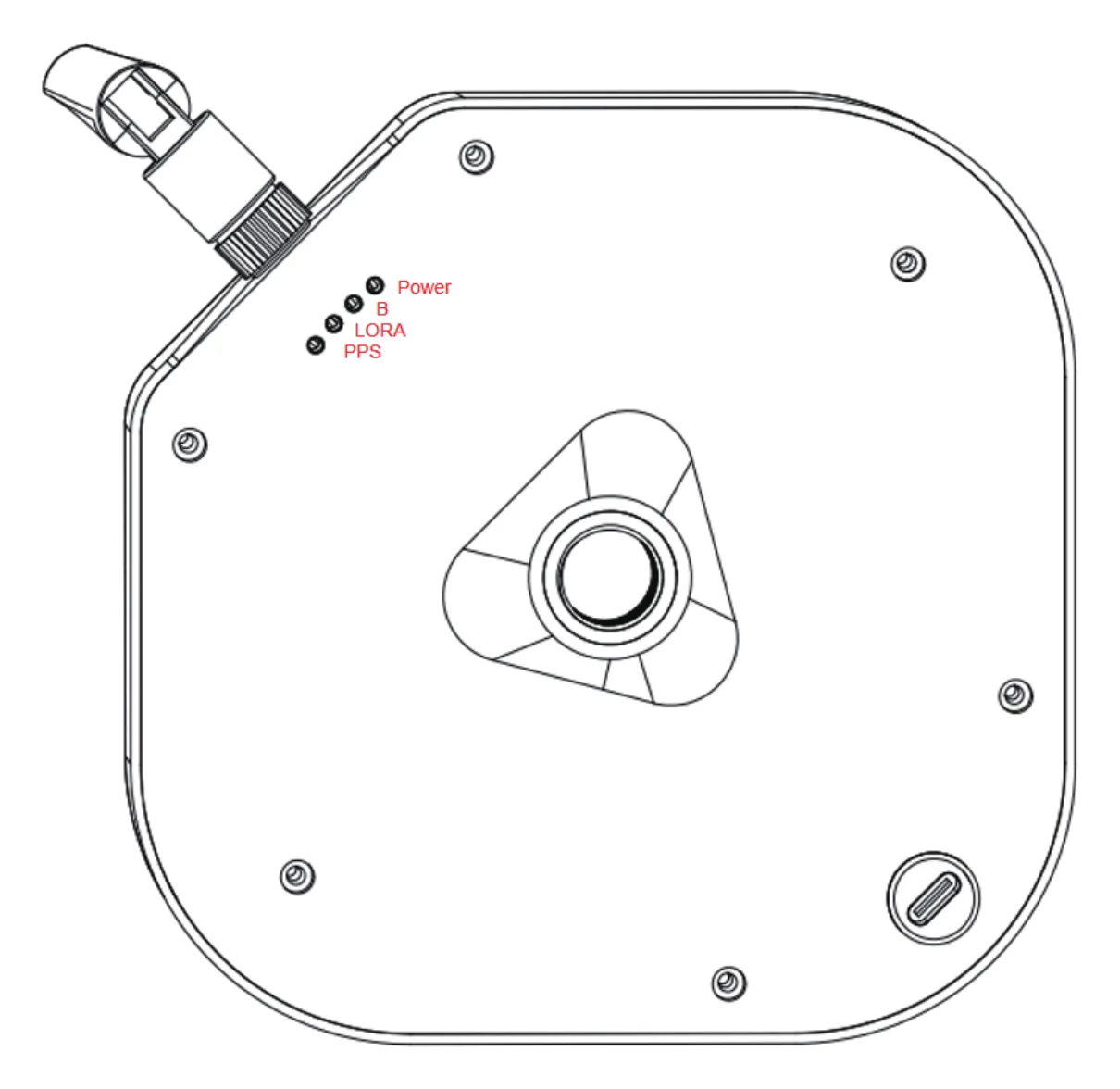
| LED | Functional Status |
|---|---|
| Power | Power indicator (green light) is solid on when powered up |
| B | Standby indicator |
| LORA | LORA indicator (blue light) flashes when the base station transmits differential data |
| PPS | PPS indicator (green light) flashes upon successful GNSS positioning |
| Model | RTK-12-Rd |
|---|---|
| Type | Quad-Constellation Multi-Frequency Dual-Antenna RTK Rover |
| Constellation | BDS · GPS · GLONASS · Galileo (multi-frequency) |
| Heading | Dual-antenna moving baseline (primary / secondary) |
| PPS Accuracy | 20 ns (RMS) |
| Velocity Accuracy | 0.03 m/s (RMS) |
| Time To First Fix | cold < 30 s · hot < 4 s |
| Data Update Rate | 5 Hz |
| Baud Rate | 230400 |
| Differential Data | RTCM 3.X |
| Data Format | NMEA-0183 · Unicore |
| Data Link | LoRa (paired with base) |
| Operating Voltage | 5 V |
| Operating Current | ≤ 350 mA |
| Operating Temp. | −40°C ~ +85°C |
| Interface | USB Type-C · GH1.25-6P GPS · GH1.25-4P debug |
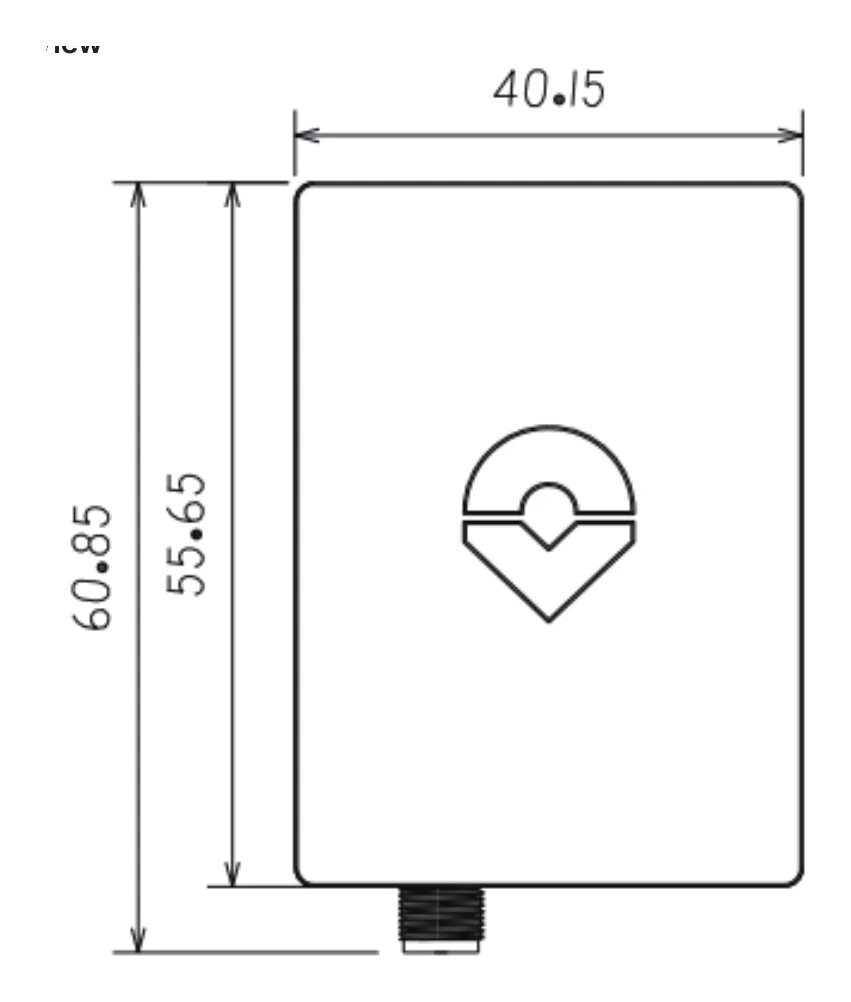
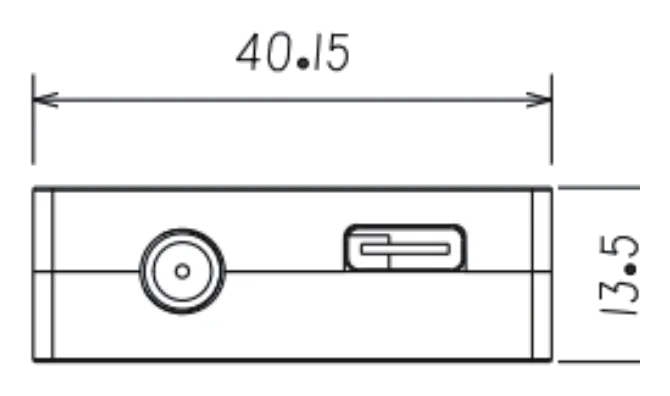
| Dimensions | 60.85 × 40.15 × 13.5 mm (±0.5 mm) |
| Weight | ≈ 27.8 g (without antennas) |
| Antennas | 2× quadrifilar helix + 1× rubber whip · min. spacing ≥ 30 cm |
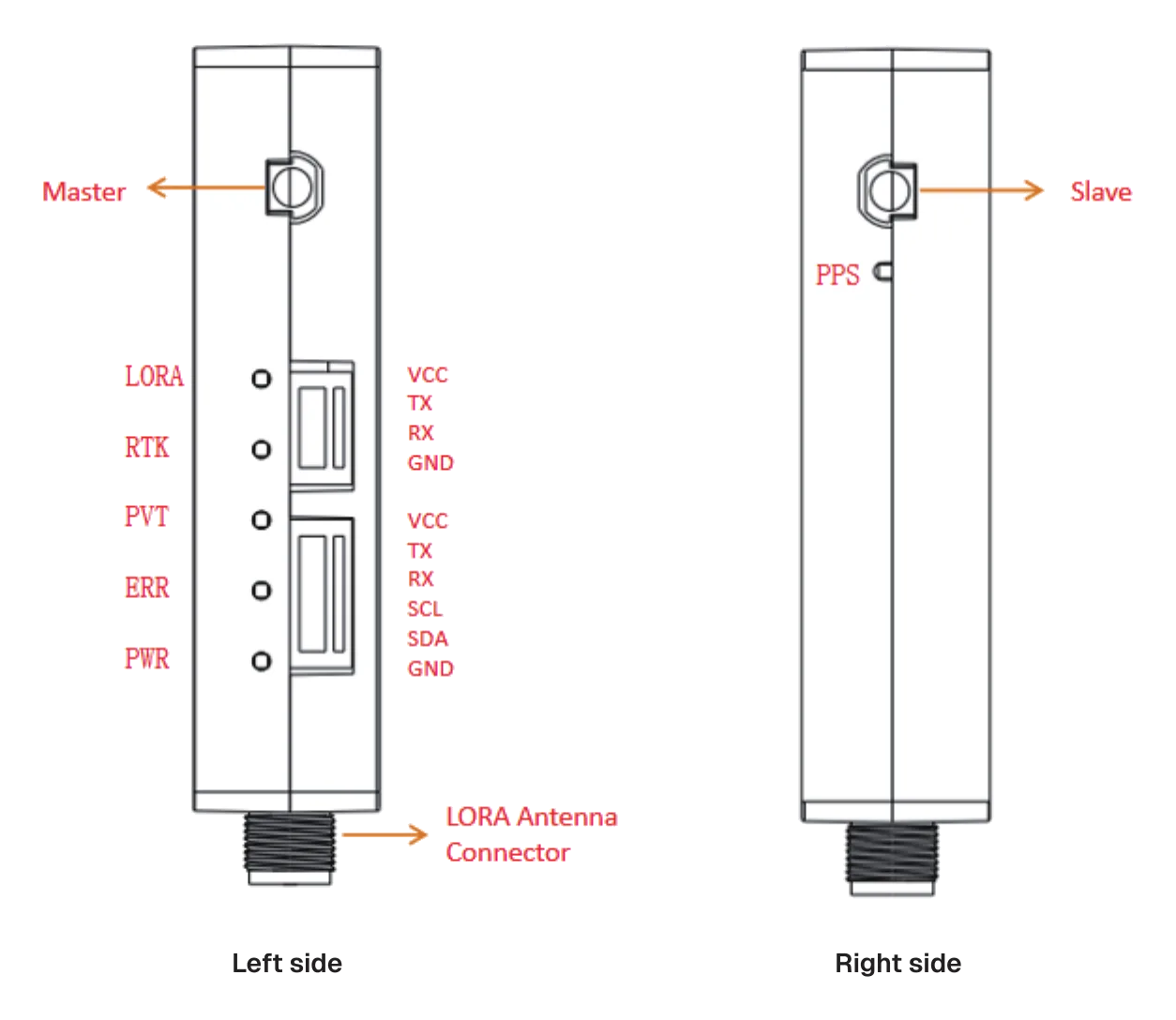
| GH1.25-6P (GPS) | Name | Function |
|---|---|---|
| 1 | VCC | Power input · +5 V |
| 2 | TX | UART data transmit |
| 3 | RX | UART data receive |
| 4 | SCL | Magnetometer I²C clock |
| 5 | SDA | Magnetometer I²C data |
| 6 | GND | Ground |
| GH1.25-4P (Debug) | Name | Function |
|---|---|---|
| 1 | VCC | Power input · +5 V |
| 2 | TX | UART data transmit |
| 3 | RX | UART data receive |
| 4 | GND | Ground |
| LED | Function Status |
|---|---|
| PWR | Power indicator |
| LORA | LoRa link status |
| RTK | RTK fix status |
| PVT | Position / velocity / time fix status |
| PPS | Flashes on successful GNSS positioning |
| ERR | Reserved indicator |
Thank you for choosing a CORVON product. Please read this disclaimer carefully — by using this product you acknowledge and agree to the following. Because we cannot control how this product is installed, used, or maintained, we accept no liability for any loss or damage arising from its use, and any unauthorized modification is undertaken at your own risk.
Install the base-station whip antenna before powering on — powering the base without the antenna can permanently damage the chip; use a power adapter rated 2 A or higher. Place the base on a stable, open site with a clear view of the sky, away from buildings, trees and strong RF or magnetic sources, antenna facing up. On the rover, keep the two GNSS antennas (primary / secondary) at least 30 cm apart for a reliable heading solution. Observe correct wiring and polarity on the GH1.25 connectors — reversed or mis-wired connections can permanently damage the module.