The CORVON RTK-13 Kit-s is a multi-constellation, dual-frequency RTK positioning kit built around the RTK-13-B base station and the compact RTK-13-Rs rover. The system provides real-time differential corrections over a LoRa data link for centimetre-level 3D positioning, with high sensitivity, low power consumption, and compact hardware for UAVs, unmanned vessels, mapping, agriculture and robotic applications.
- Tracking Sensitivity — −167 dBm
- Fast Update Rate — up to 20 Hz
- LoRa Link — real-time differential data
- Integrated Compass on Rover — QMC5883
- Dual-Frequency Reception — L1 / L2
- Standard GNSS Output — NMEA-0183 / UBX supported
- On-Board RTK Algorithm — up to 1 cm + 1 ppm
- Active / FPC Antenna Options — matched to base and rover
.webp)
.webp)
.webp)
.webp)
| Model | RTK-13-B |
|---|---|
| Type | Multi-Constellation Dual-Frequency RTK Base Station |
| Satellite Systems & Frequencies | BDS: B1I, B2I · GPS: L1C/A, L2C · GLONASS: L1OF, L2OF · Galileo: E1, E5b · QZSS: L1C/A, L2C · SBAS: EGNOS, WAAS, GAGAN, MSAS |
| Sensitivity | Cold start −148 dBm · hot start −157 dBm · reacquisition −160 dBm · tracking −167 dBm |
| Horizontal Positioning Accuracy | 1.5 m (CEP50, dual-frequency / four-system, open sky) |
| RTK Accuracy | 1 cm + 1 ppm (CEP50, open sky) |
| Time To First Fix | Cold start 24 s · hot start 2 s · reacquisition 2 s |
| Dynamic Performance | Velocity accuracy ≤ 0.05 m/s · speed ≤ 500 m/s · altitude ≤ 50,000 m (Airborne 4g mode) |
| Navigation Update Rate | 20 Hz |
| Data Protocol | NMEA |
| Data Interface | UART · baud rate 115200 (configurable) |
| Data Link | LoRa |
| Operating Frequency | 902 ~ 928 MHz / 863 ~ 870 MHz |
| Transmit Power | 22 dBm |
| Receive Sensitivity | −115 dBm |
| Communication Range | 10 km (no interference, unobstructed) |
| Operating Voltage | 5 V |
| Power Consumption | Startup instantaneous current ≤ 1.7 A · steady-state current ≤ 260 mA |
| Operating Temp. | −40°C ~ +85°C |
| Interface | USB Type-C (power) |
| Dimensions | 142.18 × 141.71 × 215.33 mm (±0.3 mm) |
| Weight | Approx. 308.8 g |
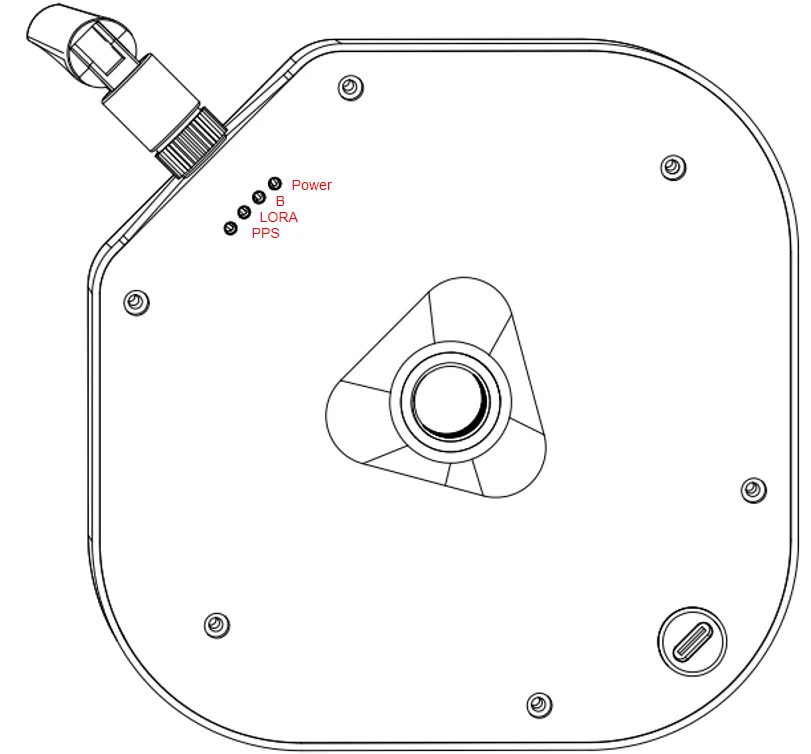
| LED | Functional Status |
|---|---|
| Power | Power indicator (green light) is solid on when powered up |
| B | Standby indicator |
| LORA | LORA indicator (blue light) flashes when the base station transmits differential data |
| PPS | PPS indicator (green light) flashes upon successful GNSS positioning |
.webp)
| Model | RTK-13-Rs |
|---|---|
| Type | Multi-Constellation Dual-Frequency RTK Rover |
| Satellite Systems & Frequencies | BDS: B1I, B2I · GPS: L1C/A, L2C · GLONASS: L1OF, L2OF · Galileo: E1, E5b · QZSS: L1C/A, L2C · SBAS: EGNOS, WAAS, GAGAN, MSAS |
| Sensitivity | Cold start −148 dBm · hot start −157 dBm · reacquisition −160 dBm · tracking −167 dBm |
| Horizontal Positioning Accuracy | 1.5 m (CEP50, dual-frequency / four-system, open sky) |
| RTK Accuracy | 1 cm + 1 ppm (CEP50, open sky) |
| Time To First Fix | Cold start 24 s · hot start 2 s · reacquisition 2 s |
| Dynamic Performance | Velocity accuracy ≤ 0.05 m/s · speed ≤ 500 m/s · altitude ≤ 50,000 m (Airborne 4g mode) |
| Navigation Update Rate | 20 Hz |
| Data Protocol | u-blox |
| Data Interface | UART · baud rate 230400 (configurable) |
| Electronic Compass | QMC5883 |
| Data Link | LoRa |
| Operating Frequency | 890 ~ 915 MHz |
| Transmit Power | 22 dBm |
| Receive Sensitivity | −115 dBm |
| Communication Range | 10 km (no interference, unobstructed) |
| Operating Voltage | 5 V |
| Power Consumption | ≤ 150 mA |
| Operating Temp. | −40°C ~ +85°C |
| Interface | A1254WF-06A · 6PIN 1.25 mm pitch keyed connector; USB Type-C for MCU debugging |
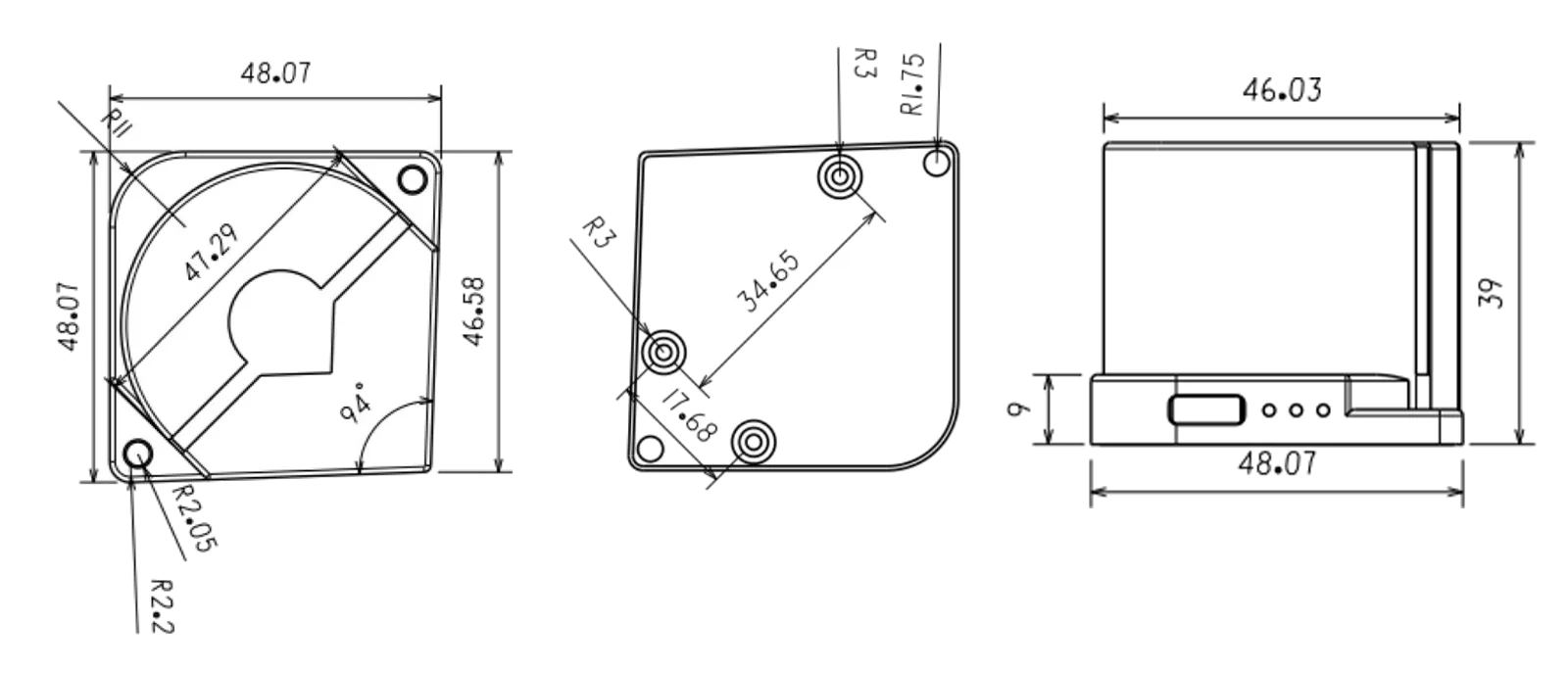
| Dimensions | 48.07 × 48.07 × 39.0 mm (±0.3 mm) |
| Weight | Approx. 30.6 g |
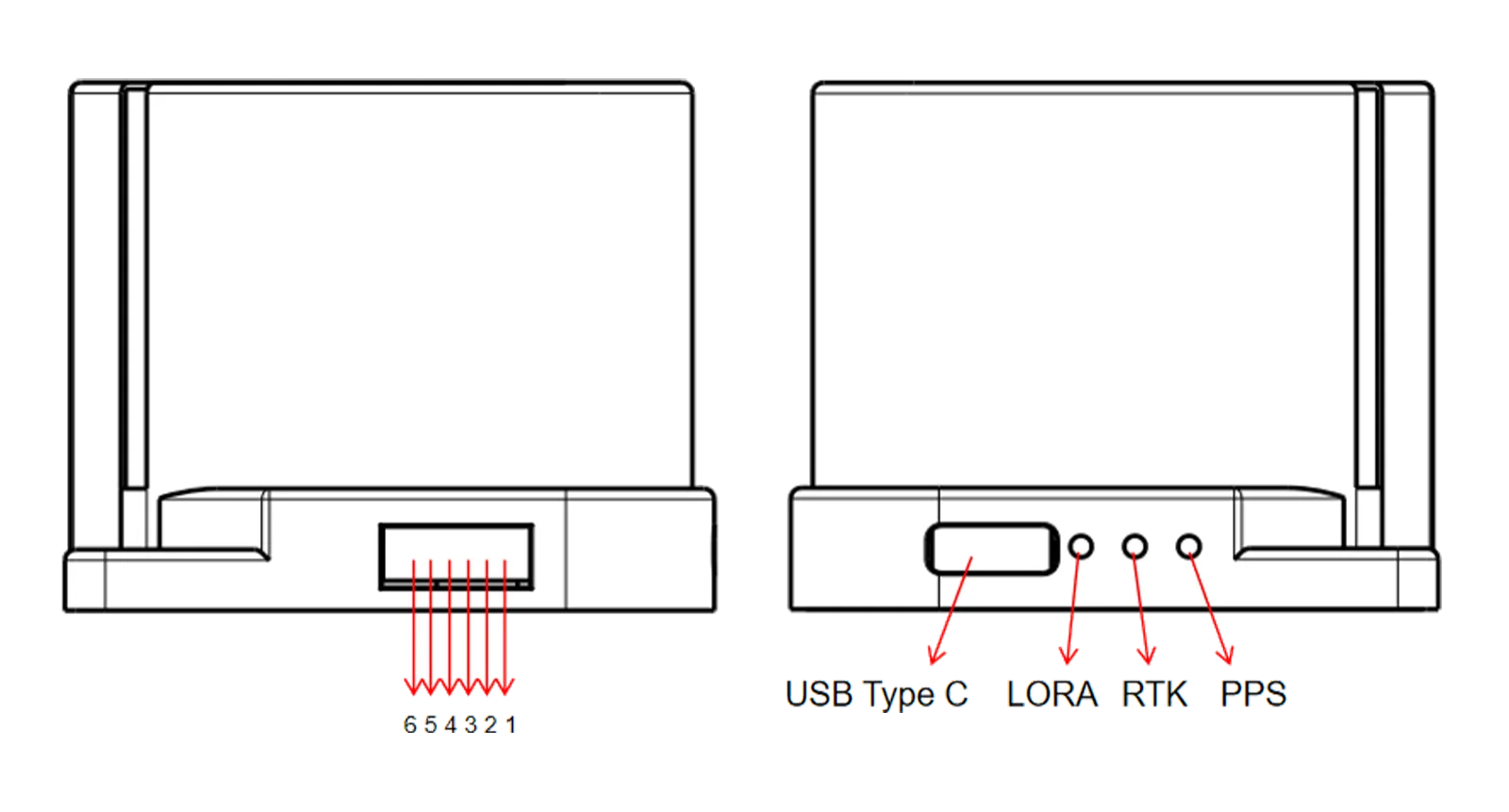
| Pin | Name | Function |
|---|---|---|
| 1 | GND | Ground |
| 2 | VCC | 5 V power input |
| 3 | RX | UART data receive |
| 4 | TX | UART data transmit |
| 5 | SCL | Compass I²C clock |
| 6 | SDA | Compass I²C data |
| LED | Function Status |
|---|---|
| LORA | Green LED flashes when differential data is received |
| RTK | Blue LED flashes when differential data is received; remains on after differential data is received and fixed |
| PPS | Green LED flashes when GNSS positioning succeeds |
| Compass Parameter | Firmware | Value |
|---|---|---|
| Model | RTK-13-Rs | QMC5883 |
| Compass Orientation | ArduPilot | Yaw 315° |
| Compass Orientation | PX4 | Roll 180°, Yaw 45° |
Thank you for choosing a CORVON product. Please read this disclaimer carefully before using the RTK-13 Kit-s. Because we cannot control how this product is installed, used, or maintained, we accept no liability for any loss or damage arising from its use, and any unauthorized modification is undertaken at your own risk.
Install the base-station whip antenna before powering on; powering the base without the antenna may permanently damage the chip. Use a power adapter rated above 2 A. Place the base in an open, unobstructed location with a clear view of the sky, away from strong RF sources, high-voltage power lines, large water surfaces and metal reflectors. Before connecting the RTK-13-Rs, power off the flight controller, verify the GH1.25-6P cable orientation, and keep the rover compass direction aligned with the aircraft heading. Reversed wiring or incorrect polarity can permanently damage the module.